Abstract
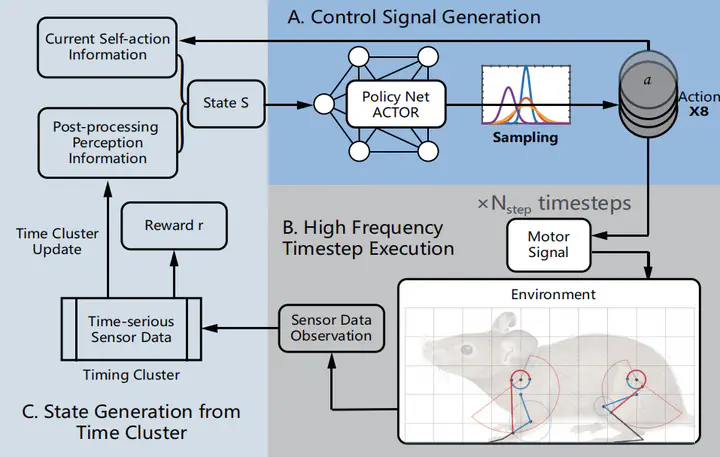
The rat robot is a soft compact quadrupedal robotwith the same size as real rats. It is difficult for such robots to learn effective motions on complex terrain owing to their underactuated nature and limited sensors. This paper proposes a novel approach for the rat robot to learn adaptive motion on rugged terrain based on reinforcement learning. The training architecture is designed for the rat robot’s nonlinear control structure. In order to improve perceptual efficiency, we gather and compress perception information based on sensor data observations in time slices during robot walking. Our proposed method demonstrates excellent exploration of complex effector space and nonlinear dynamics of the rat robot to adapt to challenging terrain. We evaluate the efficacy of our approach on a varied set of scenarios, which include various obstacles and terrain undulations and physical validation is performed. Our results show that our approach effectively achieves efficient motions on complex terrains designed for small-sized robots and outperforms other benchmark algorithms.