Biography
I’m a Ph.D. candidate in Department of Civil and Environmental Engineering and Center for Scientific Computation at The Hong Kong University of Science and Technology, under the supervision of Prof. Sen Li. I’m also a research intern in Noah’s Ark Lab (2012 Laboratories) at Huawei, mentored by Xialiang Tong. My current research primarily focuses on Deep Reinforcement Learning, Large Language Models, Intelligent Transportation, and AI Ethics.
I received my B.Eng. degree from School of Computer Science and Engineering at Sun Yat-sen University in 2024, mentored by Prof. Kai Huang (Robot RL), Prof. Chengying Gao and Prof. Ning Liu (Music AI). I was also a visiting student in Shenzhen Research Institute of Big Data at The Chinese University of Hong Kong (Shenzhen) from 2023 to 2024, under the guidance of Prof. Guangxu Zhu (Deep Wireless Sensing).
I am seeking Postdoctoral, RAP, or AP opportunities starting after September 2027. If you are interested in my profile or have any suggestions, please feel free to contact me. Thank you!
Aside from academics, I’m also the vocalist, guitarist, and bassist for several metal and rock bands, including Tokamak Disruption, NEWS (personal band) and Rights of Lethe (dissolved). You can explore my musical work on Longino • Independent Musician. If you are interested in collaborating with me (whether in academia or music), please feel free to reach out!
- Deep Learning & Reinforcement Learning & Multi-Agent
- Interdisciplinary AI & Applied AI & AI Humanities & AI Ethics
- Smart City & Intelligent Transportation & Mobile Computing
- Integrated Sensing and Communication & Network and Edge Intelligence
- Music Information Retrieval & Natural Language Processing & Multi-Modal
Ph.D. in Civil Engineering (Scientific Computation), 2024~
The Hong Kong University of Science and Technology (Clearwater Bay Campus, Hong Kong)
B.Eng. in Computer Science and Technology (National Basic Subject Talent Training Plan), 2020~2024
Sun Yat-sen University (Guangzhou Campus)
Latest News
2026.05: Our paper “Pushing the Boundaries of Natural Reasoning: Interleaved Bonus from Formal-Logic Verification” has been accepted by ICML 2026.
2026.05: Our papers “Bridging MARL to SARL: An Order-Independent Multi-Agent Transformer via Latent Consensus” and “Stage Light is Sequence²: Multi-Light Control via Imitation Learning” have been submitted for possible publication.
2026.04: Our paper “Zero-Effort Image-to-Music Generation: An Interpretable RAG-based VLM Approach” has been accepted by ACM ICMR 2026, supported by the Student Travel Adward from ACM SIGMM.
2026.04: I began my first internship at Noah’s Ark Lab (2012 Laboratories), Huawei.
2026.03: Our paper “Personalized Federated Traffic Prediction via Prompt-Guided Global Representation and Node-Specific Adaptation” has been submitted for possible publication.
2026.03: Our paper “Confident RAG: Enhancing the Performance of LLMs for Mathematics Question Answering through Multi-Embedding and Confidence Scoring” has been accepted by ICLR LLM Reasoning Workshop 2026.
2026.03: Our paper “Discriminatory Order Assignment and Payment Setting on Food-Delivery Platforms: The Implicit Algorithmic Biases” has been accepted by INFORMS TSL Conference 2026.
2026.02: Our paper “Triple-BERT: Do We Really Need MARL for Ride-Sharing Order Dispatch?” has been selected for an oral presentation at ICLR 2026, supported by the Research Travel Grant from HKUST and the PhD Student Travel Fund from HKSTS.
2026.02: An interview about my recent research titled “Labor Management in Transportation Gig Systems through Reinforcement Learning” has been released at AIhub.
2026.01: Our paper “Real-Time Order Assignment for Ride-Sharing Platforms with a Mixture of Pre-booked and On-Demand Requests” has been submitted for possible publication.
2026.01: Our papers “Triple-BERT: Do We Really Need MARL for Ride-Sharing Order Dispatch?” and “Automatic Stage Lighting Control: Is it a Rule-Driven Process or a Generative Task?” have been accepted by ICLR 2026.
2026.01: Our papers “Beyond Multi‑Agent Reinforcement Learning: Scalable Centralized Control for Large-Scale Dynamic Trip-Vehicle Assignment” and “AutoFed: Personalized Federated Traffic Prediction via Adaptive Prompt” have been submitted for possible publication.
2025.12: Our paper “OSPO: One-Step Policy Optimization for Real-Time Order Assignment on Ride-Sharing Platforms with Autonomous Vehicles” has been submitted for possible publication.
2025.12: Our paper “Discriminatory Order Assignment and Payment-Setting on Food-Delivery Platforms: A Multi-Action and Multi-Agent Reinforcement Learning Framework” has been accepted by Transportation Research Part E.
2025.12: Our paper “Ride-Hailing Order Dispatching with A Mixture of On-Demand and Pre-Booked Requests via Reinforcement Learning” has been accepted by CICTP 2026.
2025.12: Our paper “KNN-MMD: Cross Domain Wireless Sensing via Local Distribution Alignment” has been accepted by IEEE TMC.
2025.12: I have passed my Ph.D. Qualifying Examination with the proposal titled “Algorithmic Discrimination in On-Demand Food-Delivery Platforms using Multi-Agent Reinforcement Learning”.
2025.12: Our paper “CSI-BERT2: A BERT-inspired Framework for Efficient CSI Prediction and Classification in Wireless Communication and Sensing” has been accepted by IEEE TMC.
2025.11: Our proposal “Towards Fairness in Transportation Gig Markets: Identifying, Imitating, and Mitigating Algorithm Discrimination via Deep Reinforcement Learning” has been accepted by AAAI/SIGAI Doctoral Consortium 2026.
2025.10: Our paper “Pushing the Boundaries of Natural Reasoning: Interleaved Bonus from Formal-Logic Verification” has been submitted for possible publication.
2025.09: Our paper “The Impacts of Data Privacy Regulations on Food-Delivery Platforms” has been accepted by Transportation Research Part C.
2025.09: Our papers “Ride-Hailing Order Dispatching with A Mixture of On-Demand and Pre-Booked Requests via Reinforcement Learning” and “Zero-Effort Image-to-Music Generation: An Interpretable RAG-Based VLM Approach” have been submitted for possible publication.
2025.09: Our proposal “Towards Fairness in Transportation Gig Markets: Identifying, Imitating, and Mitigating Algorithm Discrimination via Deep Reinforcement Learning” has been submitted for possible publication.
2025.09: Our papers “LoFi: Vision-Aided Label Generator for Wi-Fi Localization and Tracking” and “Modelling the 5G Energy Consumption using Real-world Data: Energy Fingerprint is All You Need” have been accepted by IEEE GLOBECOM GenAI NGN Workshop 2025.
2025.09: Our paper “IfWorld: A Multi-Agent Framework for Cross-Disciplinary Counterfactual Scenario Reasoning” has been submitted for possible publication.
2025.08: We have uploaded the datasets WiGesture, WiFall, WiCount, LoFi, and RPMC-L2 in Hugging Face.
2025.08: Our paper “Towards Advanced Mathematical Reasoning for LLMs via First-Order Logic Theorem Proving” has been accepted by EMNLP 2025 (main conference).
2025.08: We have uploaded the code and paramters of CSI-BERT, CSI-BERT2, Adversarial-MidiBERT, PianoBART, and Skip-BART in Hugging Face.
2025.08: Our paper “CSI-BERT2: A BERT-inspired Framework for Efficient CSI Prediction and Classification in Wireless Communication and Sensing” has been submitted for possible publication.
2025.07: Our papers “One Step is Enough: Multi-Agent Reinforcement Learning based on One-Step Policy Optimization for Order Dispatch on Ride-Sharing Platforms” and “Confident RAG: Enhancing the Performance of LLMs for Mathematics Question Answering through Multi-Embedding and Confidence Scoring” have been submitted for possible publication.
2025.06: Our paper “Does MMD Really Align? A Cross Domain Wireless Sensing Method via Local Distribution” has been accepted by IEEE/CIC ICCC 2025.
2025.06: Our paper “An Overview of Domain-Specific Foundation Model: Key Technologies, Applications and Challenges” has been accepted by Science China Information Sciences.
Activity and Service
Code: Python, C/C++ (CCF-CSP:320, Top 0.8%), Java, Matlab, SQL Music: Guitar, Keyboard, Bass, Ukulele
Teaching Assistant: HKUST CIVL 4640 Introduction to Smart City Economics (Undergraduate, Spring 2026)Interview: HKUST JUPAS 2025
Society Membership: IEEE Student Member, ACM Student Member, AAAI Student Membership,CCF Student MemberTPC Membership: IEEE WCNC Workshop 2024-2026, IEEE PIMRC Workshop 2024-2025, IEEE GLOBECOM Workshop 2025, IEEE/CIC ICCC Workshop 2025Technical Reviewer: IEEE TPAMI, IEEE TMC, IEEE/ACM TON, IEEE IOTJ, IEEE WCL, IEEE CL, Frontiers in AI, MTAP, Bentham Science Book, IEEE ICASSP 2024-2026, IEEE ICME 2024-2026, IEEE WCNC 2024-2026, ICLR 2025-2026, ACL ARR 2025-2026, IEEE IJCNN 2025-2026, IEEE MLSP 2025-2026, NeurIPS 2026, ICML 2026, AAAI 2026, CVPR 2026, ACM ICMR 2026, IEEE PIMRC 2024-2025, HKSTS 2024-2025, IEEE GLOBECOM 2025, IEEE/CIC ICCC 2025, IEEE AVSS 2025, IET IRC 2025, BTR 2025, IEEE SMC 2023
Experience
Awards
Featured Publications
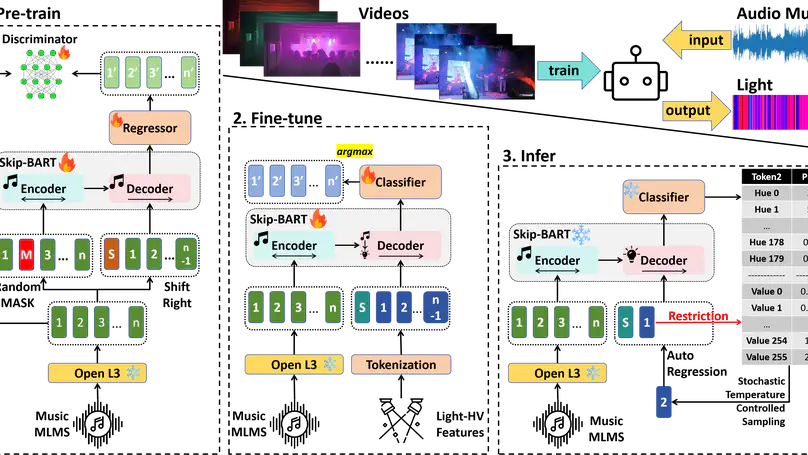
Stage lighting plays an essential role in live music performances, influencing the engaging experience of both musicians and audiences. Given the high costs associated with hiring or training professional lighting engineers, Automatic Stage Lighting Control (ASLC) has gained increasing attention. However, most existing approaches only classify music into limited categories and map them to predefined light patterns, resulting in formulaic and monotonous outcomes that lack rationality. To address this issue, this paper presents an end-to-end solution that directly learns from experienced lighting engineers – Skip-BART. To the best of our knowledge, this is the first work to conceptualize ASLC as a generative task rather than merely a classification problem. Our method modifies the BART model to take audio music as input and produce light hue and value (intensity) as output, incorporating a novel skip connection mechanism to enhance the relationship between music and light within the frame grid. We validate our method through both quantitative analysis and an human evaluation, demonstrating that Skip-BART outperforms conventional rule-based methods across all evaluation metrics and shows only a limited gap compared to real lighting engineers. Specifically, our method yields a p-value of 0.72 in a statistical comparison based on human evaluations with human lighting engineers, suggesting that the proposed approach closely matches human lighting engineering performance. To support further research, we have made our self-collected dataset, code, and trained model parameters available at https://github.com/RS2002/Skip-BART.
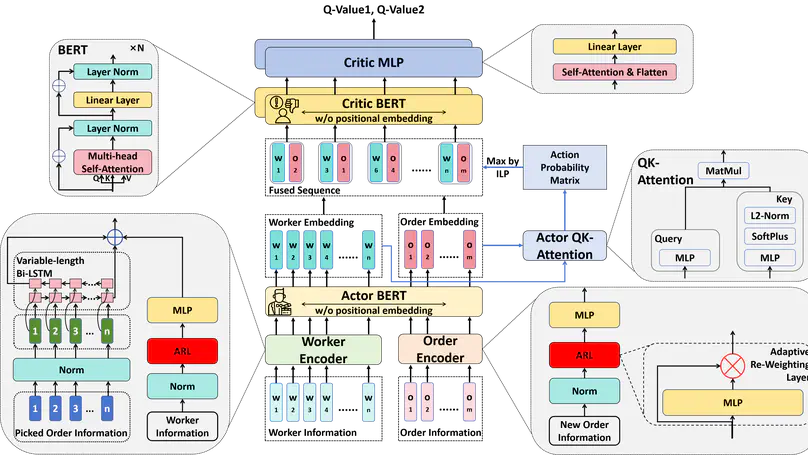
On-demand ride-sharing platforms, such as Uber and Lyft, face the intricate real-time challenge of bundling and matching passengers—each with distinct origins and destinations—to available vehicles, all while navigating significant system uncertainties. Due to the extensive observation space arising from the large number of drivers and orders, order dispatching, though fundamentally a centralized task, is often addressed using Multi-Agent Reinforcement Learning (MARL). However, independent MARL methods fail to capture global information and exhibit poor cooperation among workers, while Centralized Training Decentralized Execution (CTDE) MARL methods suffer from the curse of dimensionality. To overcome these challenges, we propose Triple-BERT, a centralized Single Agent Reinforcement Learning (MARL) method designed specifically for large-scale order dispatching on ride-sharing platforms. Built on a variant TD3, our approach addresses the vast action space through an action decomposition strategy that breaks down the joint action probability into individual driver action probabilities. To handle the extensive observation space, we introduce a novel BERT-based network, where parameter reuse mitigates parameter growth as the number of drivers and orders increases, and the attention mechanism effectively captures the complex relationships among the large pool of driver and orders. We validate our method using a real-world ride-hailing dataset from Manhattan. Triple-BERT achieves approximately an 11.95% improvement over current state-of-the-art methods, with a 4.26% increase in served orders and a 22.25% reduction in pickup times. Our code, trained model parameters, and processed data are publicly available at the repository https://github.com/RS2002/Triple-BERT .

Channel State Information (CSI) is the cornerstone in both wireless communication and sensing systems. In wireless communication systems, CSI provides essential insights into channel conditions, enabling system optimizations like channel compensation and dynamic resource allocation. However, the high computational complexity of CSI estimation algorithms necessitates the development of fast deep learning methods for CSI prediction. In wireless sensing systems, CSI can be leveraged to infer environmental changes, facilitating various functions, including gesture recognition and people identification. Deep learning methods have demonstrated significant advantages over model-based approaches in these fine-grained CSI classification tasks, particularly when classes vary across different scenarios. However, a major challenge in training deep learning networks for wireless systems is the limited availability of data, further complicated by the diverse formats of many public datasets, which hinder integration. Additionally, collecting CSI data can be resource-intensive, requiring considerable time and manpower. To address these challenges, we propose CSI-BERT2 for CSI prediction and classification tasks, effectively utilizing limited data through a pre-training and fine-tuning approach. Building on CSI-BERT1, we enhance the model architecture by introducing an Adaptive Re-Weighting Layer (ARL) and a Multi-Layer Perceptron (MLP) to better capture sub-carrier and timestamp information, effectively addressing the permutation-invariance problem. Furthermore, we propose a Mask Prediction Model (MPM) fine-tuning method to improve the model’s adaptability for CSI prediction tasks. Experimental results demonstrate that CSI-BERT2 achieves state-of-the-art performance across all tasks with relatively fast computation speeds. To facilitate future research, we will make our code and dataset publicly available upon publication. The dataset and code are publicly available at https://github.com/RS2002/CSI-BERT2.